Edmond S. L. Ho
Publications
Research
Grants
Team
Services
Teaching
Selected Projects
Humam Motion Synthesis in 3D
Modelling Two-person and Human-object Close Interactions
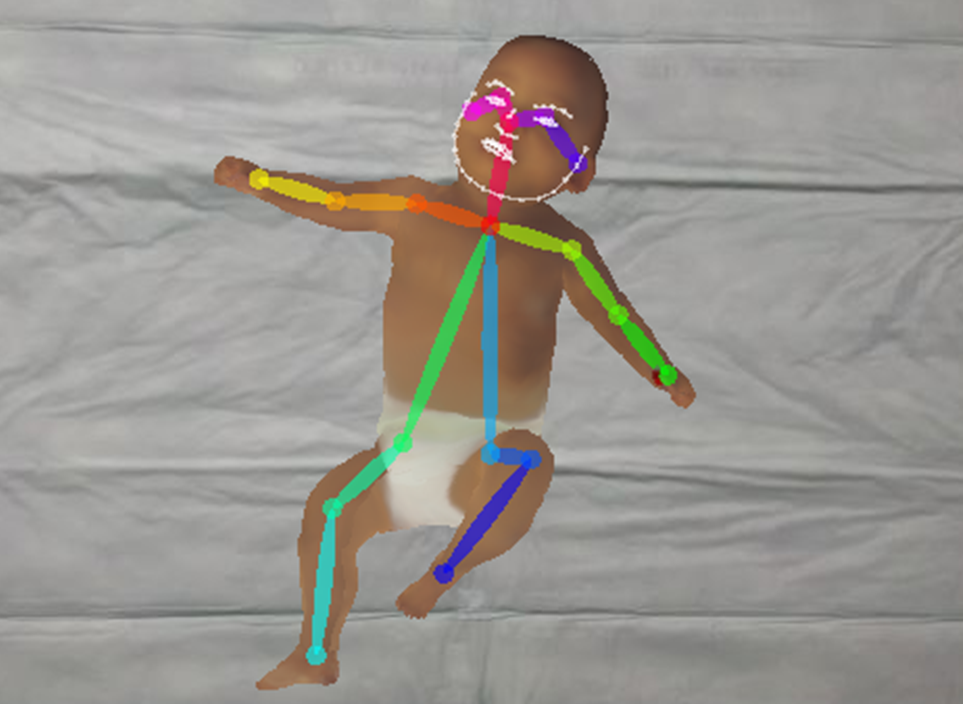
Analyzing Body Movements for Cerebral Palsy Prediction
Human Motion Analysis for Healthcare Applications
Topology-based Motion Analysis and Synthesis
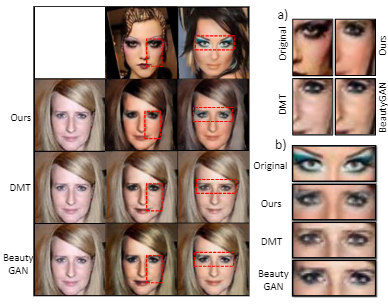
Facial Image Analysis and Editing
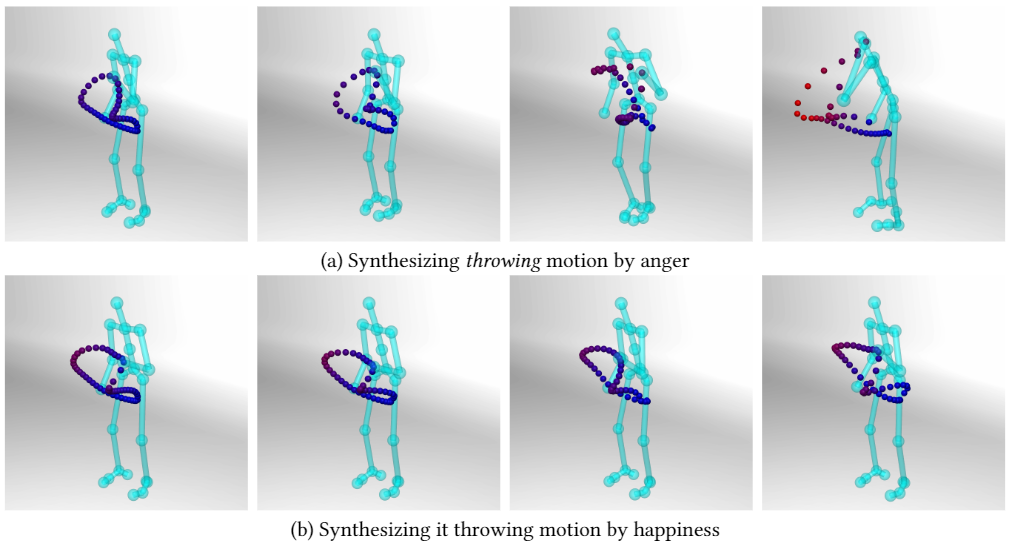
Emotion Analysis and Transfer for Facial Expressions and Body Movements
Reconstructing 3D Shapes
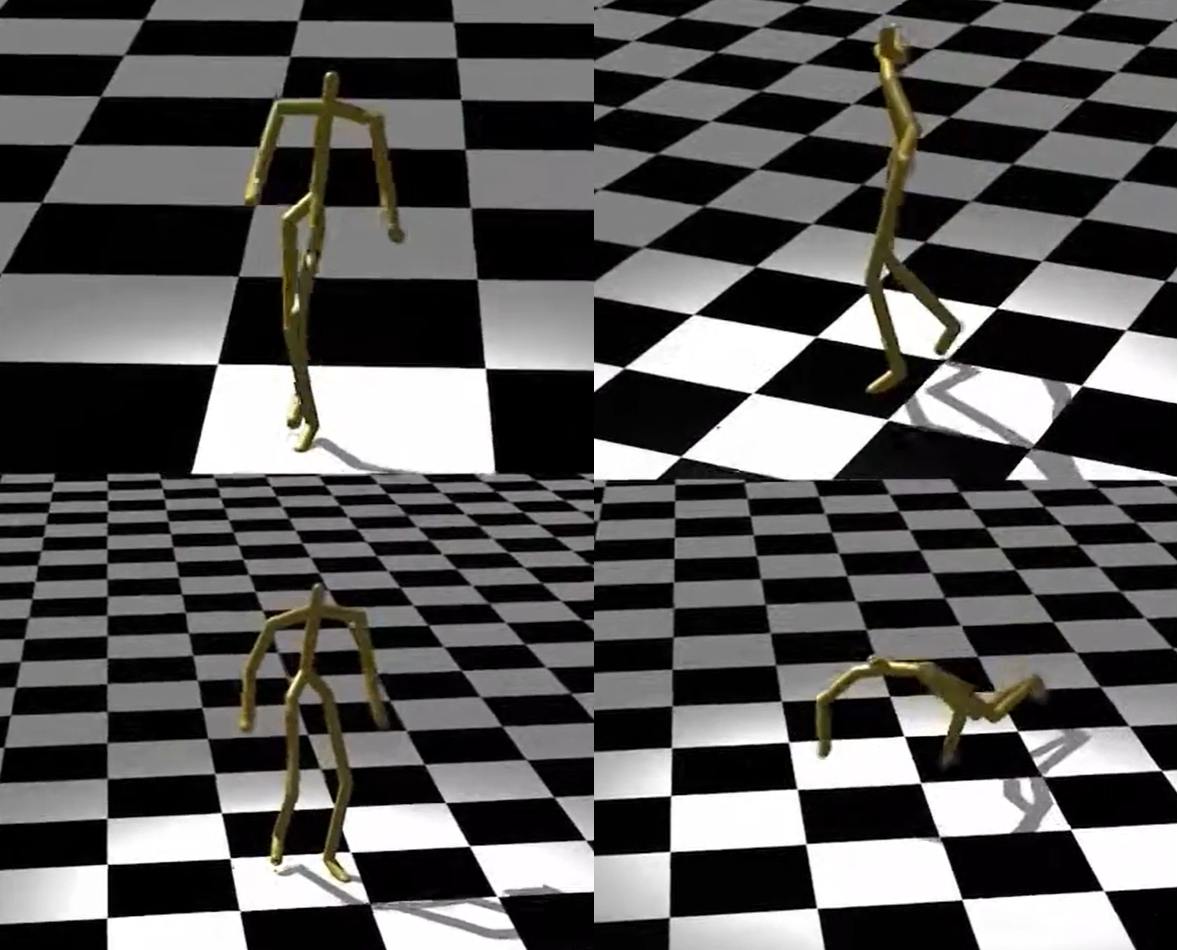
Physics-based Character Animation
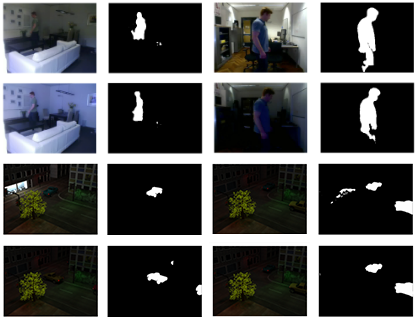
Illumination-aware Foreground Segmentation
Controlling Autonomous Vehicles